אין מוצרים בסל הקניות.











עכבר אלחוטי ארגונומי בצבע לבן Perixx | PERIMICE-720 | Wireless Dual Ergonomic Trackball Mouse
עכבר אלחוטי ארגונומי בצבע לבן
עכבר אלחוטי ארגונומי בצבע לבן Perixx | PERIMICE-720 | Wireless Dual Ergonomic Trackball Mouse
Wireless 2.4G & Bluetooth Ergonomic Vertical Trackball Mouse 4D Scrool Wheel
| |
תכונות: עכבר אלחוטי ארגונומי בצבע לבן Perixx | PERIMICE-720 | Wireless Dual Ergonomic Trackball Mouse
- Egronomic Trackball Mouse – עכבר כדור עקיבה ארגונומי אלחוטי זה כולל את הלחצנים שמאלה, ימין, אחורה, קדימה ומתגי DPI שכולם עובדים עם כדור העקיבה בו זמנית. קל לשנות את מהירות הסמן עם לחצני מתג DPI לאפשרויות רגישות מרובות למעקב. (רזולוציה 600/1600)
- Natural Ergo Design – עכבר כדור העקיבה הארגונומי מיועד למשתמשים ימניים בכל צורות וגדלים של היד. מוצר זה מומלץ לפציעות מאמץ חוזרות ונשנות והמשתמשים עובדים פרקי זמן ארוכים במיוחד על המחשב בגלל הלחץ המופחת על פרק כף היד והידיים . לדוגמה, מוצר זה מושלם עבור עובדי משרד, גיימרים וגולשי אינטרנט.
- ניווט קל וחסכון במקום – המשטח על כדור העקיבה בצפיפות גבוהה מצופה באפקט נצנצים מטופל מיוחד המספק למשתמשים מעקב ודיוק יוצאי דופן, כמו גם בעל אסתטיקה נעימה . הכל על המסך נמצא בהישג יד של תנועת אגודל קטנה ללא צורך להזיז את היד וזה חוסך מקום באזור העבודה שלך.
- זווית מתכווננת – מגבונים ניתנים להסרה ייחודיים להתאמה אישית של זווית העכבר מ-0 עד 10 או 20 מעלות לצרכים השונים של כל משתמש כדי למזער את העומס על פרק כף היד והזרועות
- Tilted-Scroll-Wheel – גלגל הגלילה כולל פונקציית לחיצה אמצעית וכן גלילה אופקית ואנכית לחוויית גלישה מהירה ונוחה.
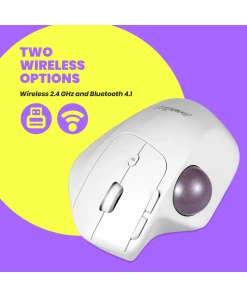
- מצב כפול אלחוטי – מעבר חלק בין שני מכשירים באמצעות Bluetooth או חיבור אלחוטי 2.4 GHz מושלם עבור מספר מכשירים.
- מידות – 5.47 x 4.06 x 1.97 אינץ’
- DPI – 600/1600
- דרישות מערכת – חלון 7, 8, 10 ומעלה
מוצרים נוספים:
קטגוריה: עכברים
מוצרי יצרן נוספים: Perixx
משלוחים חינם לכל הארץ בקניה מעל 1,500 ש״ח
פרטים שחשוב לנו שתדעו:
- אפשרות לעד 3 תשלומים
- קניה מאובטחת ושירות לקוחות מעולה
מוצרים קשורים


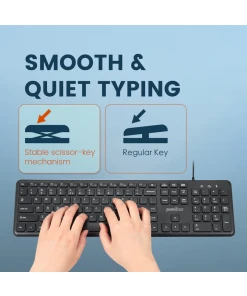
מקלדת חוטית ארגונומית בצבע שחור


מקלדת חוטית ארגונומית בצבע שחור

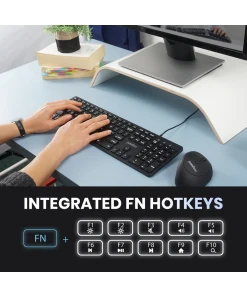
מקלדת חוטית ארגונומית בצבע שחור

מקלדת חוטית ארגונומית בצבע שחור


מקלדת חוטית ארגונומית בצבע לבן


מקלדת חוטית ארגונומית בצבע שחור


מקלדת חוטית ארגונומית בצבע שחור
